Signal processing for environment-aware radar (SPEAR)
Distributed signal processing for connected automotive radar sensing.
The SPEAR project studies signal processing for connected automotive radar systems. The goal is to exploit vehicular connectivity to improve perception in mixed traffic conditions where vehicles have different sensing capabilities.
Digital mmWave radar waveform design and algorithms
Interference-aware distributed radar sensing
Multimodal sensing for automotive radar
Surface-aided radar sensing
The project develops advanced signal processing methods for next-generation automotive radar. It focuses on distributed processing over the communication backbone network, so multiple sensors can cooperate instead of operating in isolation.
Summary
In future automotive radar systems, multiple mmWave radars are networked to enable high-resolution localization and obstacle detection. SPEAR addresses the gap between current radar sensing and connected sensing infrastructure by developing advanced algorithms that make better use of available vehicles, sensors, and communication links.
The project is part of TU Delft’s Signal Processing Systems research line on distributed autonomous sensing systems.
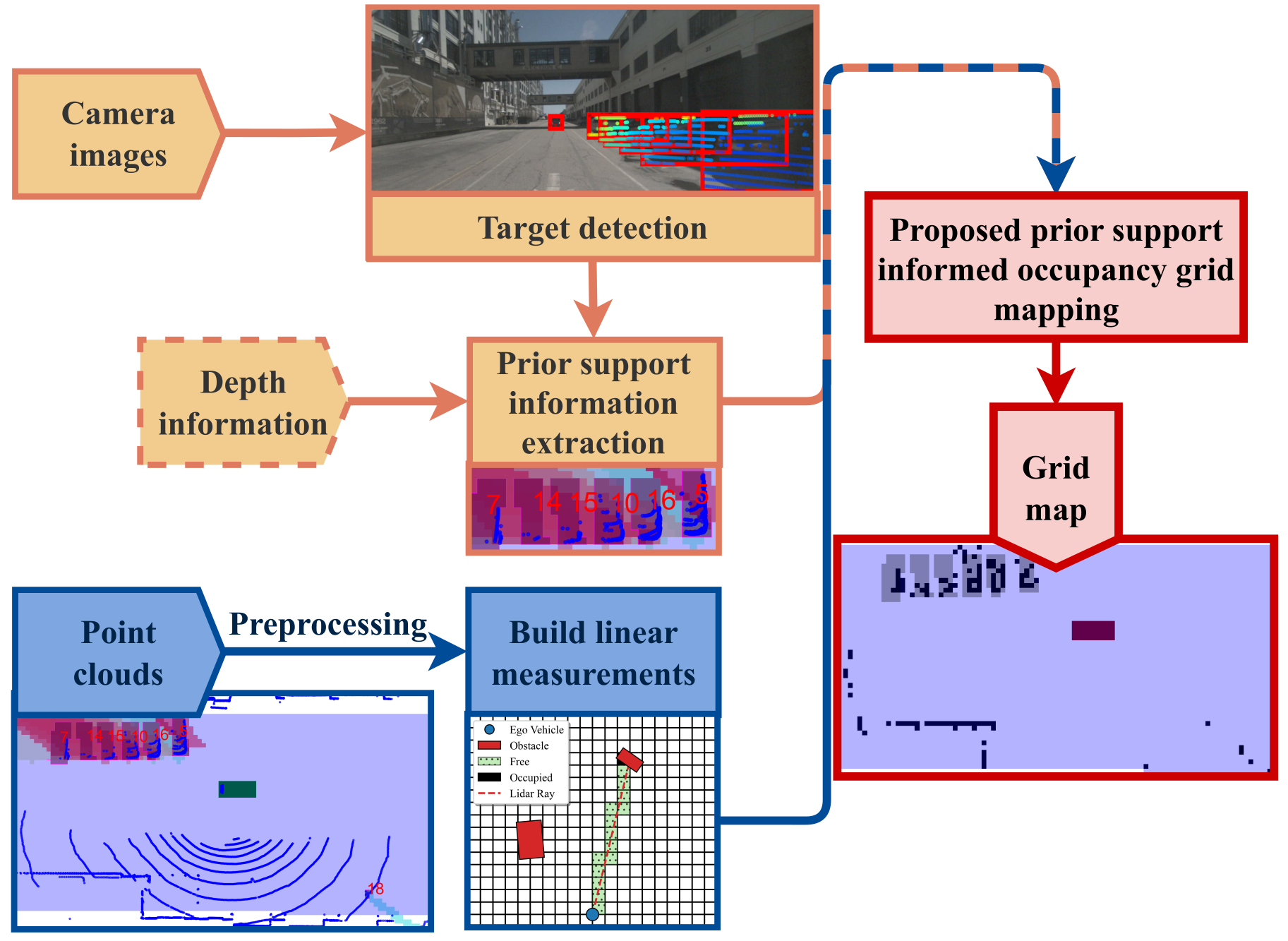
@article{zhai2026camera,title={Camera-Aided Binary Prior Support-Informed Occupancy Grid Mapping},author={Zhai, Peiyuan and Joseph, Geethu and Myers, N. Jonathan and Pandharipande, Ashish},journal={IEEE Sensors Journal},volume={26},number={3},pages={4340--4348},year={2026},month=feb,doi={10.1109/JSEN.2025.3642255},publisher={IEEE},}
2025
IEEE Sensors Journal
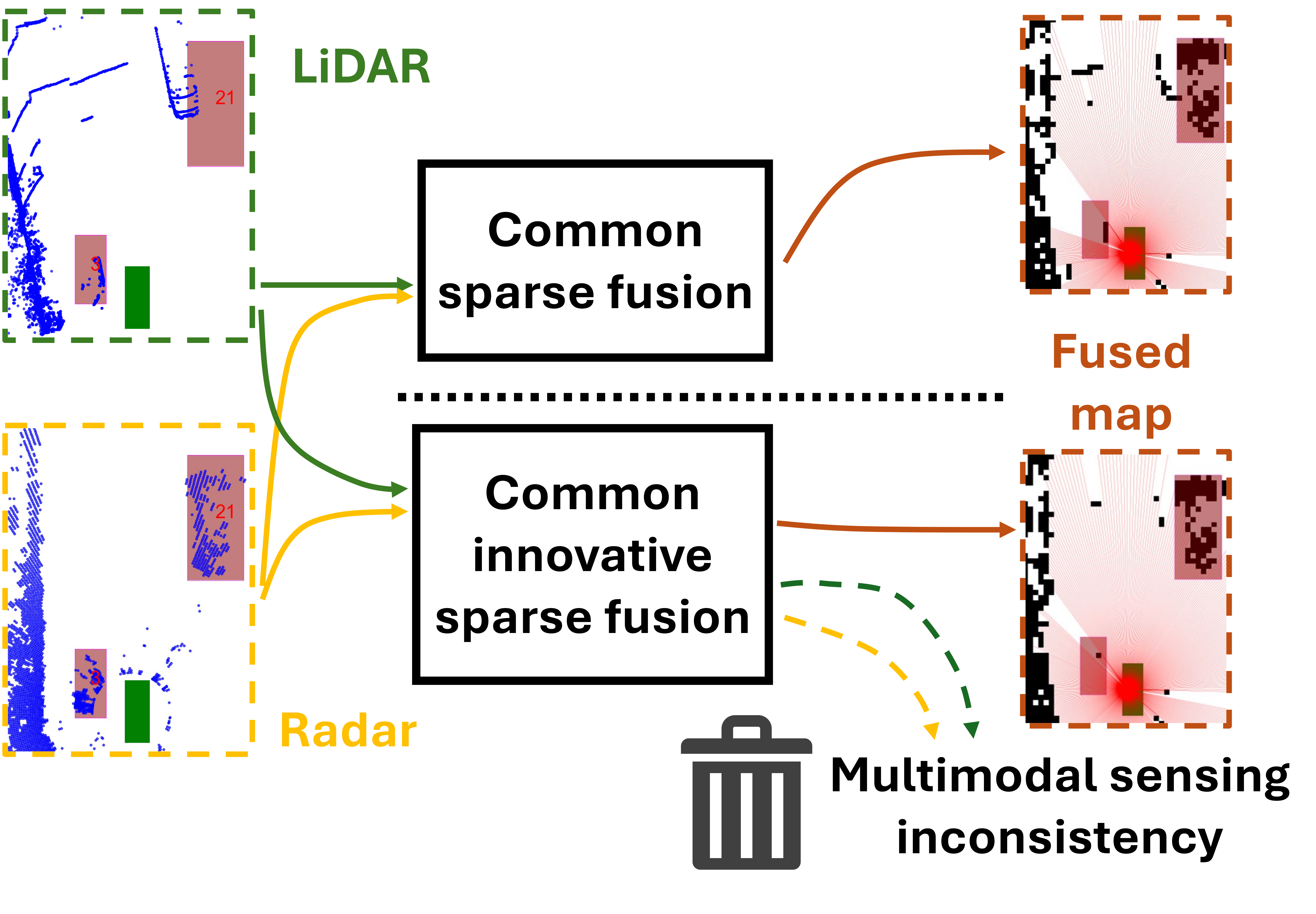
Spatial Sparsity-Aware Radar-LiDAR Fusion for Occupancy Grid Mapping in Automotive Driving
Peiyuan Zhai, Geethu Joseph, N. J. Myers, and 2 more authors
@article{zhai2025spatial,title={Spatial Sparsity-Aware Radar-LiDAR Fusion for Occupancy Grid Mapping in Automotive Driving},author={Zhai, Peiyuan and Joseph, Geethu and Myers, N. J. and Onen, Cemalcan and Pandharipande, Ashish},journal={IEEE Sensors Journal},volume={25},number={17},pages={33328--33338},year={2025},month=sep,doi={10.1109/JSEN.2025.3592023},publisher={IEEE},}
IEEE Sensors Journal
Accelerated Pattern-Coupled Sparse Bayesian Learning for Automotive Occupancy Mapping
Frank Harraway, Peiyuan Zhai, Geethu Joseph, and 1 more author
@inproceedings{zhai2024sparsity,title={Sparsity-aware occupancy grid mapping for automotive driving using radar-LiDAR fusion},author={Zhai, Peiyuan and Joseph, Geethu and Myers, N. J. and Onen, Cemalcan and Pandharipande, Ashish},booktitle={2024 IEEE SENSORS},pages={1--4},year={2024},month=oct,doi={10.1109/SENSORS60989.2024.10785054},organization={IEEE},}